Giao thức CAN - Phần 3: Cách thức hoạt động của CAN bên trong thiết bị phần cứng
-
 NI PCI-8517
NI PCI-8517 -
 1.01.0281.12001 Ixxat USB-to-CAN V2 Compact D-SUB 9 Isolated
1.01.0281.12001 Ixxat USB-to-CAN V2 Compact D-SUB 9 Isolated -
 NI USB-8506
NI USB-8506 -
 CanEasy
CanEasy -
 NI PXIe-8510
NI PXIe-8510 -
 NI PCIe-8510
NI PCIe-8510 -
 NI USB-8502
NI USB-8502 -
 CANnector
CANnector -
 CANbridge NT 200/420
CANbridge NT 200/420 -
 CAN@net NT 100/200/420
CAN@net NT 100/200/420 -
 Bộ lặp CAN
Bộ lặp CAN -
 NI PXI-8512
NI PXI-8512
Giao thức CAN (Controller Area Network) đã được giải thích chi tiết trong 2 phần trước, trong lần này chúng tôi sẽ tập trung phân tích tầng vật lý (Physical Layer) và giới thiệu cơ chế của đường truyền trong CAN. Thiết kế và cấu tạo liên quan đến phần cứng sẽ được mô tả cụ thể trong chương này.
1. Kết nối của các Node trong CAN Bus:
Đầu tiên, hãy nhìn vào sơ đồ kết nối của các CAN Node đến CAN Bus.
Hình 1. Kết nối các Node đến CAN Bus
✤ Bộ vi điều khiển / Vi xử lý (Microcontroller / Microcomputer) Xử lý việc truyền nhận dữ liệu. Bên cạnh đó nó cũng điều khiển hoạt động của các Node.
✤ Bộ điều khiển CAN (CAN Protocol Controller) Thực hiện các chức năng của giao thức CAN (Bit Stuffing, phân xử quyền ưu tiên của tín hiệu, xử lý lỗi, kiểm tra CRC,…). Thông thường thì bộ điều khiển CAN sẽ được tích hợp thêm bộ lọc.
✤ Bộ thu phát CAN (CAN Transceiver) Tạo điện áp truyền cho Bus, điều chỉnh, đảm bảo dòng điện cho thiết bị hoạt động và bảo vệ hệ thống dây nối. Bộ thu phát CAN thực hiện chức năng chính là chuyển đổi tín hiệu từ dạng TTL sang dạng tín hiệu vi sai theo tiêu chuẩn ISO 11898. Ngoài ra thì bộ thu phát CAN còn thực hiện các chức năng tùy vào hãng sản xuất IC.
Hình ảnh so sánh hai tín hiệu, TTL và điện áp vi sai:
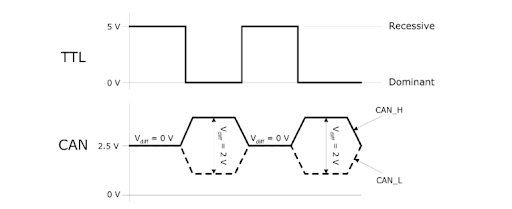
Hình 2: Tín hiệu TTL và điện áp vi sai
✤ Termination resistor (Điện trở đầu cuối / điện trở chống phản xạ): Hai điện trở (thông thường là 120Ω) phải được nối vào cuối CAN Bus. Chúng đóng một vai trò quan trọng trong việc kết hợp trở kháng của Bus và không thể thiếu. Nếu không có chúng độ tin cậy và chống nhiễu (do tín hiệu bị phản xạ) của việc truyền dữ liệu trên Bus sẽ giảm đáng kể, thậm chí không thể truyền được và có thể gây hư hỏng thiết bị.
Trong hình 1, bộ điều khiển CAN được kết nối với CAN Bus thông qua bộ thu phát CAN. Sự khác biệt trong các tiêu chuẩn tầng vật lý như CAN High-speed và CAN Low-speed được quy định bởi bộ thu phát CAN. Điều này có nghĩa là bộ điều khiển CAN không bị ảnh hưởng bởi bất kỳ tầng vật lý nào và cơ chế của giao thức CAN có thể được sử dụng chung.
2. Phân loại bộ điều khiển CAN (CAN Controller):
Tiếp theo chúng tôi sẽ giới thiệu về cách thức phân loại các bộ điều khiển CAN (CAN Controller)
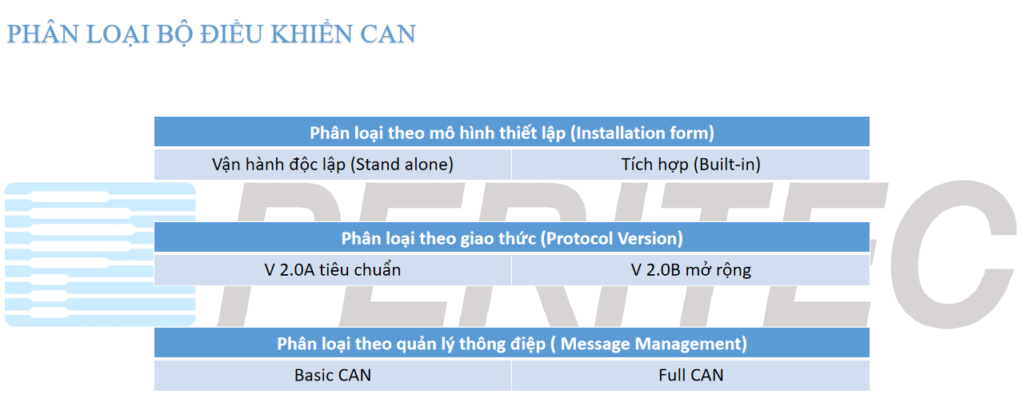
Hình 3. Phân loại CAN controller
✤ Phân loại theo mô hình cài đặt (Installation Form) Có 2 mô hình cài đặt là: độc lập (Stand Alone) với bộ vi xử lý và được tích hợp (Built-in) bên trong bộ vi xử lý. Nhưng hiện nay hầu hết sử dụng mô hình được tích hợp bên trong bộ vi xử lý.
✤ Phân loại theo giao thức Nội dung này đã được trình trong phần trước.
✤ Phân loại theo quản lý thông điệp Tiếp theo, hãy so sánh sự khác biệt trong quản lý thông điệp. Basic-CAN có số lượng Buffer truyền / nhận nhỏ hơn Full-CAN và được sử dụng trong giao tiếp tốc độ trung bình (Medium-speed) đến thấp (Low-speed) (Hình 4). Mặt khác, Full-CAN có số lượng Buffer truyền / nhận lớn hơn Basic-CAN và được sử dụng để truyền nhận tín hiệu tốc độ cao (High-speed) (Hình 5).
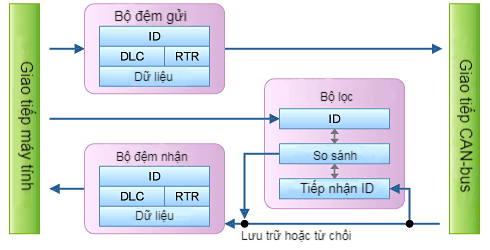
Hình 4. Basic-CAN
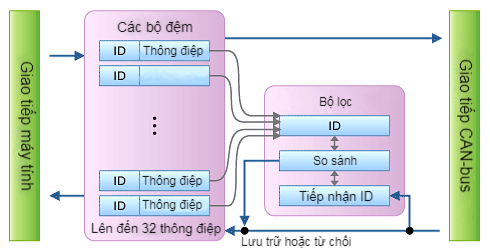
Hình 5. Full-CAN
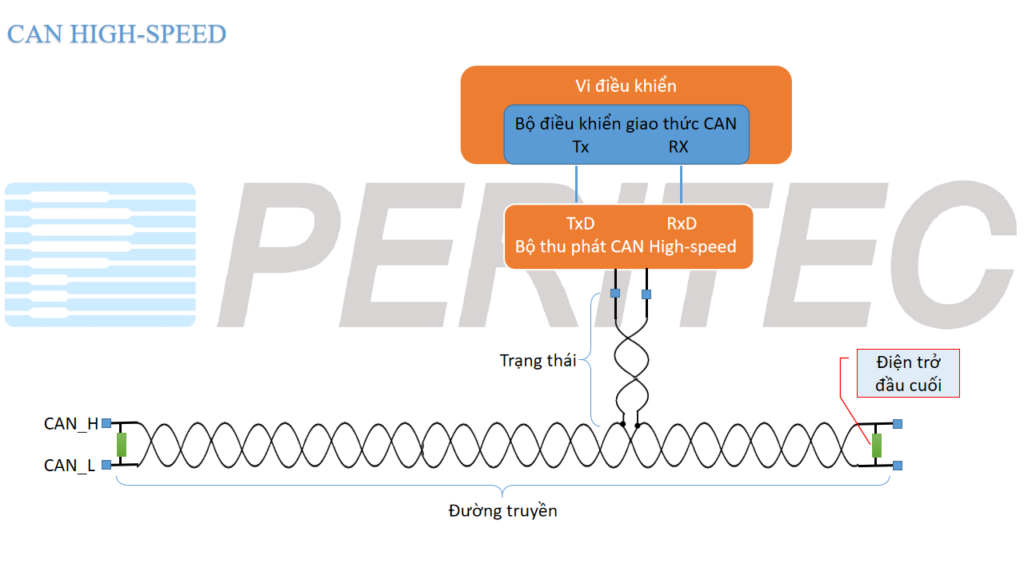
- CAN High-speed: Tốc độ giao tiếp có thể lên đến 1 Mbps, vì vậy được sử dụng chủ yếu trong các hệ thống truyền động (Powertrain) yêu cầu trao đổi dữ liệu tốc độ cao. Tín hiệu được truyền trên cặp dây xoắn (differential pair), do đó nó ít bị ảnh hưởng bởi nhiễu từ bên ngoài. Ngoài ra, theo tiêu chuẩn, chênh lệch điện áp giữa CAN_H và CAN_L là 1,8V, bộ thu phát CAN được điều khiển với dòng điện 30mA bằng 2 điện trở kết thúc 120Ω (Hình 6).
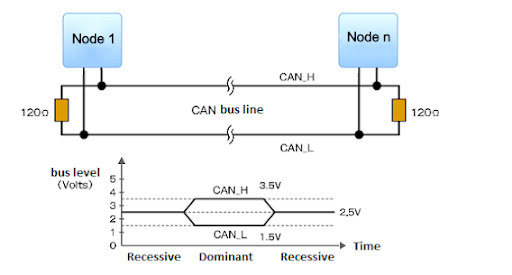
Hình 6. Tầng vật lý của CAN High-speed
- CAN Low-speed: Tốc độ giao tiếp có thể lên tới 125 Kbps. Nó chủ yếu được sử dụng cho các bộ phận ở phần thân của xe (không phải động cơ) hay các thiết bị giải trí, tiện ích trên xe, nơi không yêu cầu trao đổi dữ liệu tốc độ cao. Thông thường, kết nối bao gồm 2 dây giống như trong CAN High-speed. Tuy nhiên, khi xảy ra sự cố trong đường truyền, việc giao tiếp có thể tiếp tục chỉ với một dây. Điều này là do các dây nối có thể được đặt ở phần bên ngoài của xe nên có nguy cơ bị hư hỏng. Việc kết nối vẫn có thể tiếp tục chỉ với một dây sẽ làm giảm rủi ro khi sự cố xảy ra (Hình 7).
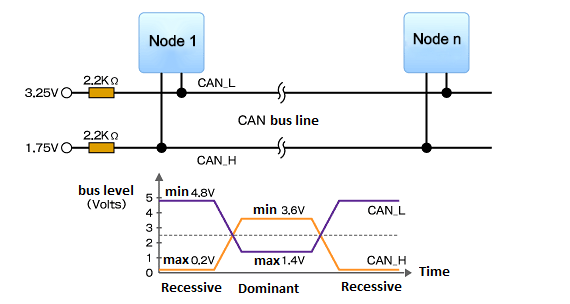
Hình 7. Tầng vật lý của CAN Low-speed
- Phần 1: Giao thức CAN - Phần 1: Giới thiệu về giao thức CAN
- Phần 2: Giao thức CAN - Phần 2: Phương thức truyền dữ liệu CAN
- Phần 4: Giao thức CAN - Phần 4: Phân tích dữ liệu CAN và các vấn đề thường gặp với dữ liệu CAN