Giao thức CAN - Phần 1: Giới thiệu về giao thức CAN
-
 NI PCI-8517
NI PCI-8517 -
 1.01.0281.12001 Ixxat USB-to-CAN V2 Compact D-SUB 9 Isolated
1.01.0281.12001 Ixxat USB-to-CAN V2 Compact D-SUB 9 Isolated -
 NI USB-8506
NI USB-8506 -
 CanEasy
CanEasy -
 NI PXIe-8510
NI PXIe-8510 -
 NI PCIe-8510
NI PCIe-8510 -
 NI USB-8502
NI USB-8502 -
 CANnector
CANnector -
 CANbridge NT 200/420
CANbridge NT 200/420 -
 CAN@net NT 100/200/420
CAN@net NT 100/200/420 -
 Bộ lặp CAN
Bộ lặp CAN -
 NI PXI-8512
NI PXI-8512
1. Lịch sử hình thành và phát triển :
Vào những năm đầu của thập niên 1980, nền công nghiệp xe hơi đang ngày càng phát triển mạnh mẽ. Cùng với sự phát triển đó là sự gia tăng về nhu cầu tự động hóa các thiết bị điện tử (ECU: Electronic Control Unit) được sử dụng trong xe. Khi đó hầu hết các ECU được kết nối với nhau thông qua giao tiếp nối tiếp thông thường như RS232, UART,...Điều này dẫn đến việc kiểm soát hoạt động của các ECU và việc liên kết chúng với nhau trở nên rất phức tạp, kết cấu cồng kềnh và chi phí nối dây cũng không hề nhỏ.
Ví dụ về việc kết nối các ECU khi CAN chưa ra đời:
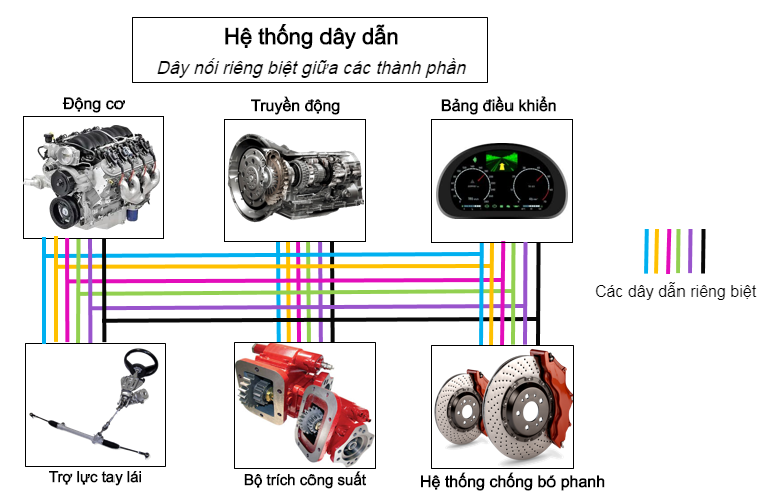
Hình 1. Sơ đồ kết nối các ECU trong ô tô trước khi giao thức CAN ra đời
Để giải quyết vấn đề đó, Công ty Robert Bosch GmbH của Đức đã bắt đầu phát triển giao thức CAN từ năm 1983 và được chính thức công bố vào năm 1986 ở hội nghị của hiệp hội Kỹ sư ô tô (Society of Automotive Engineers - SAE) ở Detroit, Michigan, Mỹ.
Những chip điều khiển CAN (CAN controller chip) đầu tiên được sản xuất bởi Intel và Philips, xuất hiện trên thị trường vào năm 1987. Năm 1994, CAN chính thức trở thành một tiêu chuẩn quốc tế (ISO 11898) và trở thành một tiêu chuẩn bắt buộc được áp dụng rộng rãi trong ô tô ở châu Âu. Xe Mercedes-Benz W140 là chiếc xe đầu tiên được trang bị CAN.
2. Khái niệm về CAN:
CAN là viết tắt của từ Controller Area Network, là một mạng điều khiển vùng cho phép các thiết bị trong cùng Bus có thể giao tiếp nối tiếp với nhau chỉ thông qua 2 dây nối (CAN-High và CAN-Low). Các thiết bị trong cùng Bus được gọi là các Node (trong xe hơi ta có thể coi chúng là các ECU), chúng có thể lên tới vài chục Node trong phạm vi từ vài trăm mét đến vài kilomet mà vẫn đảm bảo được tốc độ truyền tín hiệu. Điều đó tạo nên sự khác biệt của CAN so với các giao thức khác.
Ví dụ về việc CAN Bus làm cho kết nối giữa các thiết bị trong xe hơi trở nên đơn giản hơn:
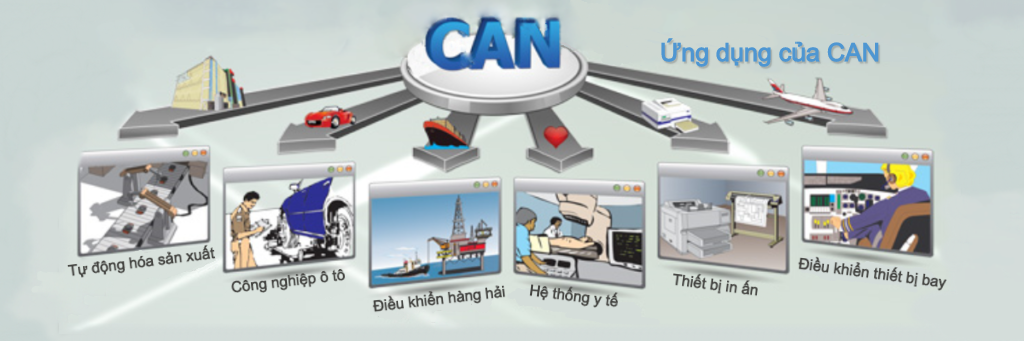
Hình 2. Ứng dụng của CAN trong ngành công nghiệp hiện đại
3. Thông số kỹ thuật của CAN Bus:
| Kích thước dữ liệu | Tối đa 8 bytes/Frame |
| Tốc độ truyền | Tối đa 1 Mbps trong phạm vi 40m |
| Phạm vi tối đa | 6 km với tốc độ 10 Kbps |
| Số Node tối đa | 70 Nodes |
| Phương thức tránh xung đột trong việc truyền dữ liệu giữa các Node | Dựa trên thứ tự ưu tiên cho ID của tín hiệu (tham khảo Phần 2: Phương thức truyền dữ liệu CAN) |
4. Lợi ích khi dùng CAN:
Những lợi ích quan trọng của việc sử dụng CAN:
- Giảm chi phí cho dây nối.
- Mang lại tính linh hoạt trong việc mở rộng và cài đặt hệ thống.
- Các ECU có thể gửi và nhận thông tin tín hiệu từ các ECU khác trong cùng Bus.
- Nhiều tín hiệu cảm biến có thể chia sẻ với nhau.
- Cho phép chẩn đoán và xử lý lỗi dễ dàng.
- Có thể dễ dàng phát hiện lỗi truyền.
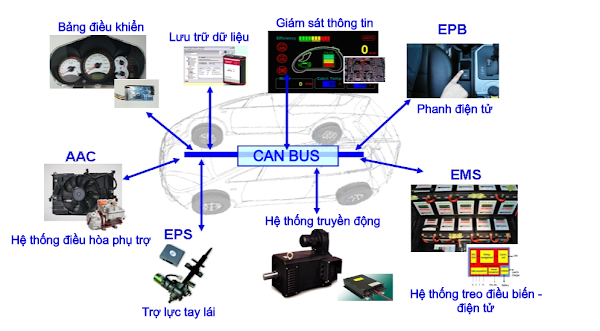
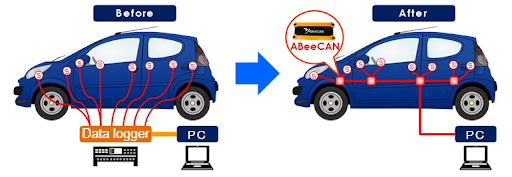
Hình 3. Đơn giản hóa việc nối dây bằng cách sử dụng CAN
Ngày nay, do có nhiều ưu điểm về mặt thiết kế và sự phù hợp với công nghệ điện tử kỹ thuật số, CAN không chỉ được ứng dụng trong xe hơi mà còn trong nhiều lĩnh vực khác như y tế, hàng không, vũ trụ,...
5. Sản phẩm về CAN được phát triển bởi PERITEC:
5.1. Giới thiệu thiết bị Cho đến nay công ty chúng tôi đã phát triển nhiều hệ thống ứng dụng CAN trong công nghiệp xe hơi cho những đối tác lớn. Trong quá trình phát triển rất nhiều dự án về CAN đó chúng tôi đã đúc kết cho mình được nhiều kinh nghiệm và kiến thức để từ đó thiết kế và chế tạo được bộ sản phẩm có tên là ABeeCAN. Đây là thiết bị dùng để thu thập tín hiệu Analog (là các tín hiệu của nhiệt độ, độ ẩm, điện áp) và chuyển đổi thành dữ liệu CAN để chuyển đến CAN Bus.

Hình 4. Hình ảnh thiết bị ABeeCAN
5.2. Ưu điểm của thiết bị:
- Chi phí, thời gian nối dây được giảm đi đáng kể.
- Dữ liệu của vài chục đến vài trăm kênh có thể được truyền tới một CAN Bus với chỉ hai dây nối chính.
- Giảm nhiễu bằng cách thiết lập mô-đun đo gần cảm biến. Sau khi chuyển đổi tín hiệu tương tự, bộ ghi dữ liệu có thể được nối dây theo phương thức CAN để giảm nhiễu của các giá trị đo được.
- Gọn nhẹ, dễ vận chuyển và tiết kiệm điện. Các cảm biến có thể dễ dàng thay thế, nguồn và dây truyền dữ liệu của cảm biến được tích hợp chung trong một sợi dây cáp, dẫn đến tiết kiệm điện.
5.3. Ứng dụng của ABeeCAN
Các cây cầu sau khi được đưa vào sử dụng vẫn cần phải thường xuyên theo dõi chặt chẽ các thông số để đảm bảo các tiêu chuẩn chất lượng. Với ưu điểm là có thể truyền tín hiệu trong phạm vi vài km mà vẫn giữ được độ chính xác, ABeeCAN có thể giúp thu thập chính xác dữ liệu tại nhiều vị trí khác nhau ở trên cầu và chuyển đến một trung tâm điều khiển một cách dễ dàng.
Ngoài ra, ABeeCAN cũng rất phù hợp cho việc phát triển những hệ thống trên xe hơi như hệ thống điều hòa không khí. Vì nó rất nhỏ gọn và có thể kết nối được với nhiều thiết bị khác nhau cùng một lúc.
Hình 4. Ứng dụng của ABee CAN trong phát triển hệ thống điều hòa không khí
5.4. Phần mềm
Với LabVIEW, chúng ta có thể dễ dàng phát triển những ứng dụng để thu thập và quản lý dữ liệu CAN. Dưới đây là giao diện của một chương trình lấy các thông số từ trong ô tô.
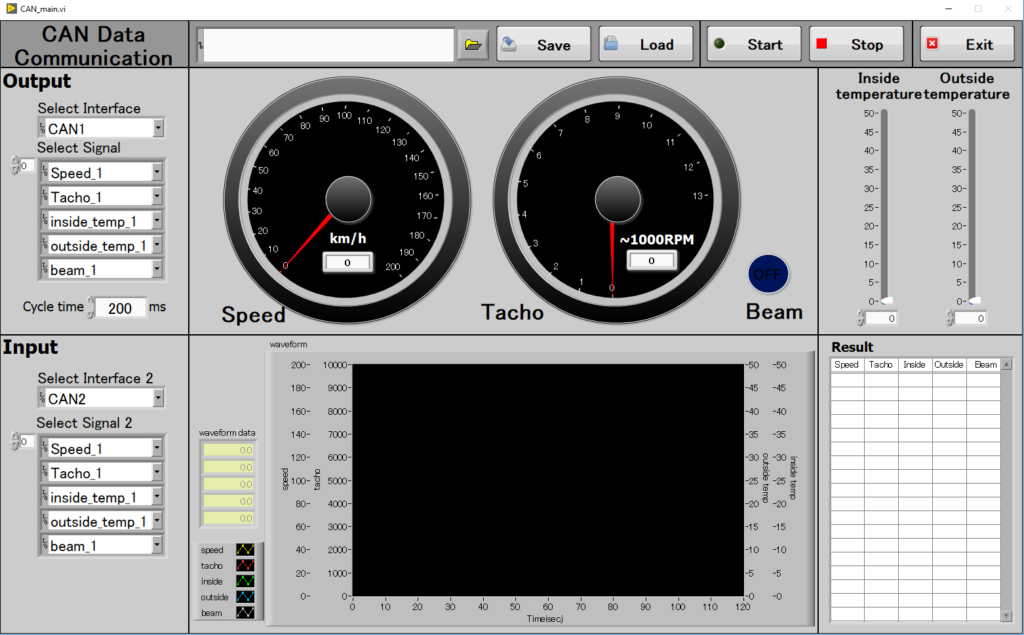
Hình 5. Giao diện chương trình thu thập dữ liệu CAN bằng LabVIEW
- Giao thức CAN - Phần 2: Phương thức truyền dữ liệu CAN
- Giao thức CAN - Phần 3: Cách thức hoạt động của CAN bên trong thiết bị phần cứng
- Giao thức CAN - Phần 4: Phân tích dữ liệu CAN và các vấn đề thường gặp với dữ liệu CAN