Giải pháp mô phỏng
Giải pháp mô phỏng và phân tích mô phỏng Residual Bus (RBS) Mô phỏng chức năng dựa trên Matlab / Simulink
Với các giải pháp mô phỏng Ixxat, bạn có thể mô phỏng hành vi giao tiếp của các thành phần bị thiếu (ECU) trong mạng truyền thông. Mô phỏng giao tiếp (RBS) được cấu hình dựa trên các file mô tả mạng bằng một công cụ dễ sử dụng. Không cần mã hóa riêng. Mô phỏng chức năng có thể được thực hiện bằng tập lệnh, mã người dùng C hoặc mô hình MATLAB / Simulink. Mô phỏng độc lập hoặc dựa trên PC - tùy thuộc vào người sử dụng. Bạn không muốn lãng phí thời gian - trong trường hợp đó, các giải pháp mô phỏng Ixxat là lựa chọn phù hợp.
- Cách tiếp cận dựa trên PC hoặc độc lập
- Các ví dụ về ứng dụng
- Khả năng tương thích của phần cứng với các công cụ phần mềm
- Yêu cầu và chức năng
- Lựa chọn sản phẩm cho các ứng dụng mô phỏng
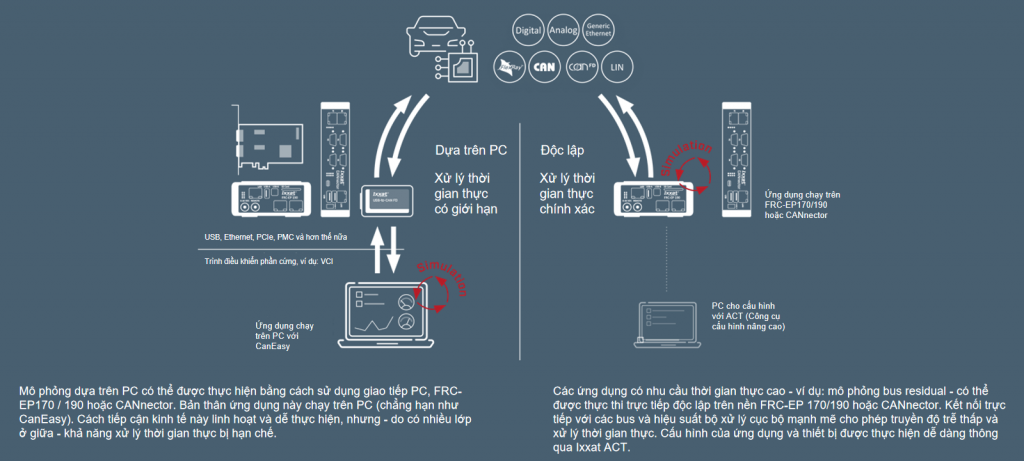
Cách tiếp cận dựa trên PC hay độc lập?
Các ví dụ về ứng dụng
- Phát triển dựa trên PC

Mô phỏng tín hiệu thủ công đơn giản
sử dụng giao tiếp PC để truy cập bus và CanEasy với các widget tích hợp sẵn.
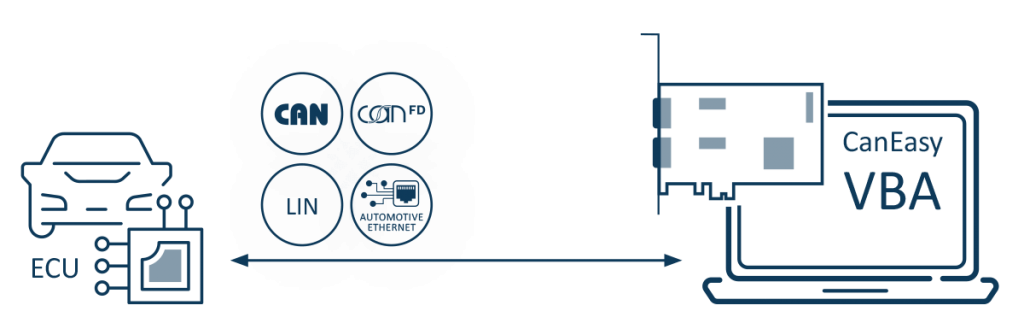
Mô phỏng thiết bị được lập trình
sử dụng CanEasy với chức năng lập trình tích hợp để cho phép mô phỏng tín hiệu tự động đơn giản.
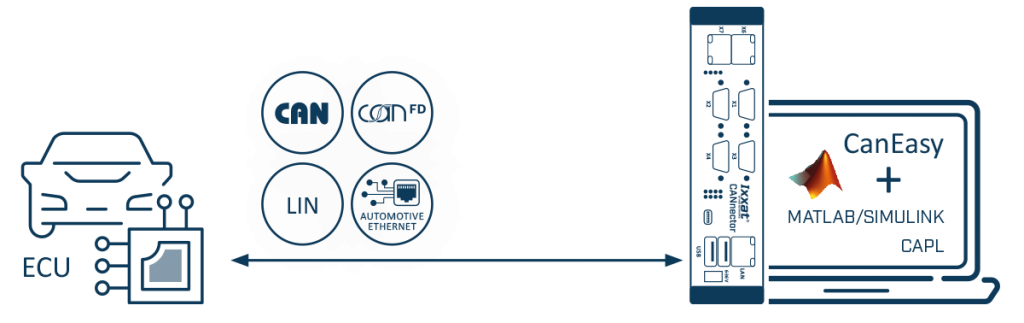
Mở rộng CanEasy với Matlab/Simulink và CAPL
để cho phép mô phỏng hệ thống và thiết bị phức tạp dựa trên PC.
- Kiểm tra độc lập
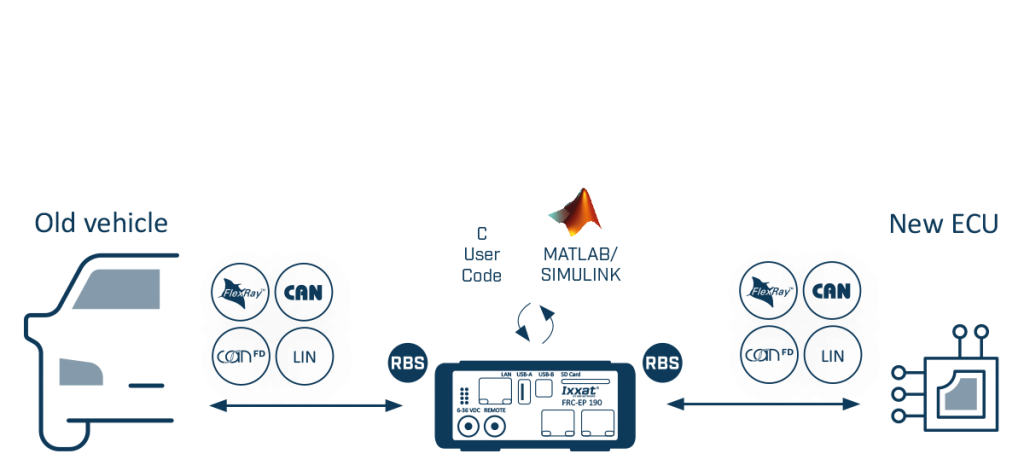
Ứng dụng Gateway
giữa các mạng vật lý và logic khác nhau chạy mô hình Matlab/Simulink và / hoặc mã người dùng C trực tiếp trên phần cứng có khả năng thời gian thực.
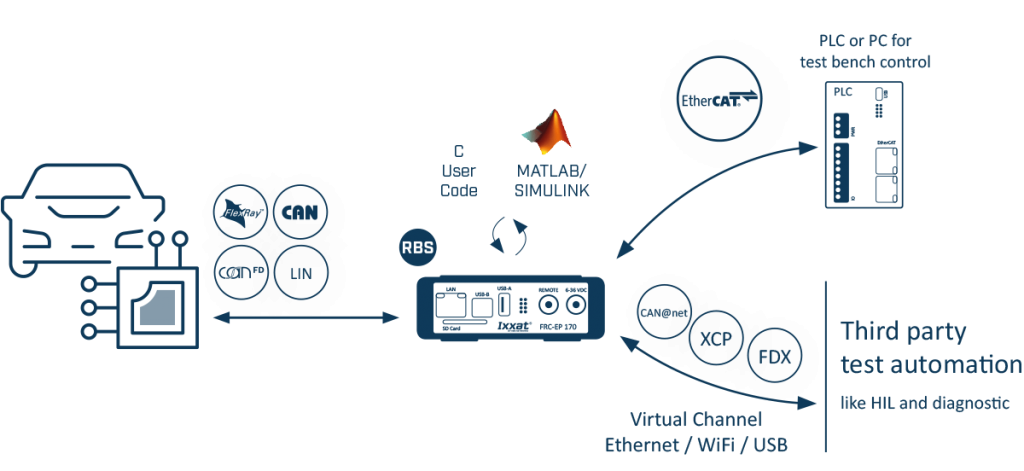
Ứng dụng testbench cổ điển
Mô phỏng bus residual với kiểm tra tổng và bộ đếm còn giá trị để giữ cho DuT (Thiết bị đang kiểm tra) tồn tại cộng với trao đổi dữ liệu hoặc / và kích thích thông qua công cụ ví dụ: EtherCAT master
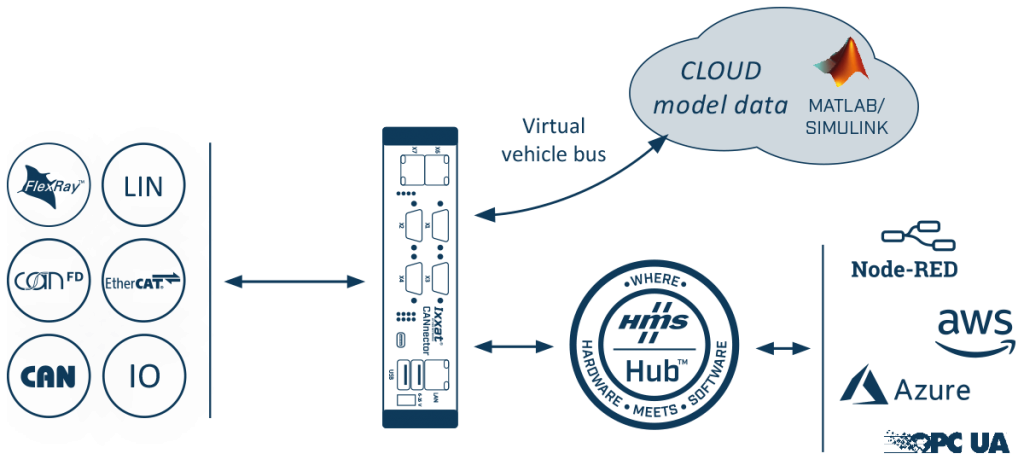
Kết nối Cloud
Ảo hóa hệ thống bus lên Cloud hoặc quản lý hệ thống từ xa.
Các điểm nổi bật
Độc lập hoặc dựa trên PC
Nền tảng phần cứng mạnh mẽ cho phép hoạt động độc lập hoặc dựa trên PC

Các chế độ cổng đa năng
Dễ dàng lựa chọn giữa hoạt động dựa trên tín hiệu, dựa trên khung và chế độ hỗn hợp với các phương thức gửi linh hoạt theo lựa chọn

Định dạng dữ liệu
Hỗ trợ DBC, LDF, ARXML, Fibex, ESI, MDF, BLF, ASC, CSV

Ghi dữ liệu
Ghi nhật ký song song CAN, CAN FD, FlexRay, LIN, CAN ảo (FD) trên Ethernet, Ngõ vào tương tự, I / O kỹ thuật số, …
Lập trình
Mã người dùng C với môi trường phát triển dựa trên Eclipse và / hoặc các mô hình Matlab / Simulink để điều chỉnh giải pháp cho các yêu cầu cụ thể của bạn

Cấu hình dễ dàng
Kích hoạt, bộ lọc và giải thích tín hiệu - dễ dàng cấu hình bằng cách kéo và thả

Yêu cầu và chức năng cho mô phỏng độc lập dựa trên PC và thời gian thực
| Mô phỏng dựa trên PC | Mô phỏng độc lập | |
| Thông tin phần cứng |
- CANnector, FRC-EP170, FRC-EP190 - Các giao tiếp Ixxat CAN và các nhà cung cấp khác (Vector, Peak, Kvaser, NI, Intrepid, MHS, Melexis) |
- CANnector, FRC-EP170, FRC-EP190 |
| Công cụ phần mềm |
CanEasy để phân tích và mô phỏng |
|
| Phần cứng bắt buộc | PC |
- Phần cứng thời gian thực (độc lập) - Phần cứng nhúng (Họ CANnector & FRC-EP) |
| Các file mô tả Bus | DBC, ARXML, LDF | DBC, ARXML, LDF, Fibex |
| Các hệ thống Bus | CAN, CAN FD, LIN, Automotive Ethernet, FlexRay* | CAN, CAN FD, LIN, FlexRay |
| Mô phỏng giao tiếp | ||
| Mô phỏng theo chu kỳ / sự kiện kích hoạt giao tiếp (không có tổng kiểm tra và bộ đếm còn giá trị) | Tự động bằng cách sử dụng file mô tả bus | Tự động bằng cách sử dụng file mô tả bus |
| Mô phỏng Residual bus | ||
| Mô phỏng Residual bus (RBS) với tổng kiểm tra, bộ đếm còn giá trị, v.v. | PC có mã hóa hoặc nhập CAPL | Thời gian thực, tự động tạo |
| Thao tác / Kích thích / Mô phỏng | ||
| Mô phỏng chức năng bằng Matlab / Simulink | Matlab / Simulink trên PC | Matlab / Simulink trên phần cứng thời gian thực * |
| Mô phỏng chức năng bằng mã hóa | Mã hóa trên PC | Mã người dùng C (môi trường phát triển tích hợp với Eclipse) trên phần cứng thời gian thực * |
| Kích thích và hiển thị tín hiệu thủ công | Bảng tín hiệu / Bảng người dùng | Websockets, CanEasy, canAnalyser Mini |
| Điều chế tín hiệu đơn giản | Bộ điều chế | Matlab / Simulink, mã người dùng C |
| Tính toán tín hiệu, các hàm logic | Trình chỉnh sửa công thức, Visual-Basic, C # /. Net, VB.net | Matlab / Simulink, mã người dùng C |
| Kích thích bên ngoài | CAN, COM (ví dụ: Matlab / Simulink), Ethernet, RS-232 | CAN, EtherCAT, FDX, XCP, Generic Ethernet, CAN@net, CANonEthernet ảo, CanEasy |
| Gateway | ||
| Môi trường Gateway | Plug-in trên PC | Trên phần cứng hỗ trợ thời gian thực*, cấu hình thông qua kéo và thả (tín hiệu, khung, PDU, bus logic) |
| Ghi dữ liệu | ||
| Mục tiêu ghi dữ liệu | Trên PC | Trên thẻ SD hoặc thiết bị USB (phần cứng hỗ trợ thời gian thực *) hoặc trên các hệ thống khác được kết nối với hệ thống |